Multi-Task Template Matching for Object Detection, Segmentation and Pose Estimation Using Depth Images
Published in ICRA, 2019
Multi-Task Template Matching for Object Detection, Segmentation and Pose Estimation Using Depth Images, International Conference on Robotics and Automation (ICRA), May 2019
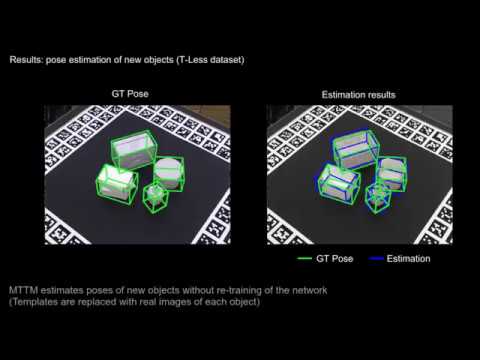
Template matching has been shown to accurately estimate the pose of a new object given a limited number of samples. However, pose estimation of occluded objects is still challenging. Furthermore, many robot application domains encounter texture-less objects for which depth images are more suitable than color images. In this paper, we propose a novel framework, Multi-Task Template Matching (MTTM), that finds the nearest template of a target object from a depth image while predicting segmentation masks and a pose transformation between the template and a detected object in the scene using the same feature map of the object region. The proposed feature comparison network computes segmentation masks and pose predictions by comparing feature maps of templates and cropped features of a scene. The segmentation result from this network improves the robustness of the pose estimation by excluding points that do not belong to the object. Experimental results show that MTTM outperforms baseline methods for segmentation and pose estimation of occluded objects despite using only depth images.